CMU15445 P2 Checkpoint1
前言
P2感觉比P1的难度大了很多,内部实现基本完全由自己决定,刚上手的时候没有指引有点手足无措,但同时也代表了实现的方式可以非常自由。
真的是很磨练人的一个project, 不过听说奇数年是实现hashmap要友好一些,有机会可以试一下
Task1
Task 1是要实现pages类,要改动的有三个文件b_plus_tree_page 、b_plus_internal_page、b_plus_leaf_page
没什么好说的,先把接口补全,之后的task还是需要对内容进行改动的,这里主要是理解他们之间的关系,方便之后的完成
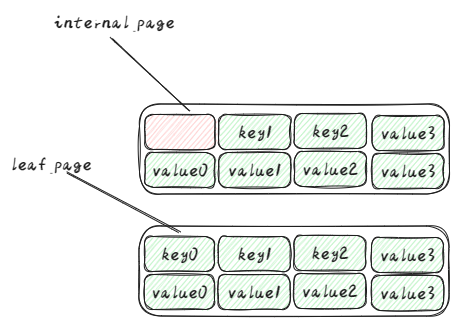
结构如下:
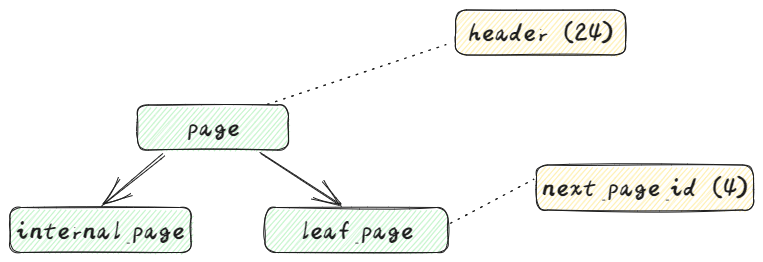
leaf_page比internal_page多一个next_page_id的字段
B+树page的整体结构:

notes
要注意的点主要有两个:1.GetMinSize() 2.array_
GetMinSize()
获取minsize,其实就是半满条件,但是leaf_page和internal_page对半满的定义不同,可以参照一下官方给的可视化工具BusTub B+Tree Printer
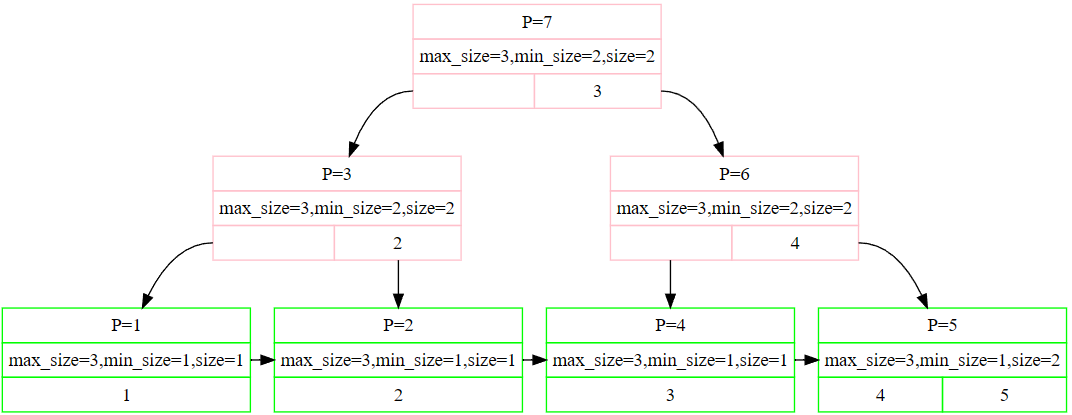
可以看到在max_size都是3的情况下,内部节点的min_size为2, 而叶节点的min_size是1,所以我们在完善GetMinSize()函数的时候要注意区分内部节点和叶子节点,内部节点为(max_size + 1) / 2, 叶子节点为max_size / 2
array_
array_其实就是用来存储键值对的容器,这里容易产生疑问的点在于array_[1]只能存一个KV吗?
这里的array_其实是一个柔性数组,允许你在结构体的末尾定义一个数组,其大小可以在运行时动态确定。
简单来说,初始化一个类对象时,无法确定该数组要设置的大小,但知道类对象的大小,就可以利用柔性数组,它可以自动填充未被其他变量使用的内存从而确定长度。柔性数组必须是类中最后一个成员。
Task2
task2要求我们实现B+树整个数据结构,整个project的重点
一共需要实现三个函数GetValue、Insert、Remove
难度也是 GetValue > Insert > Remove
GetValue
查找的流程比较简单,无非是找到key值、向下遍历。其中主要注意的是KeyComparator,这个类是专门用来比较key值大小的比较器,实现在generic_key文件中,具体实现方式可以自行查阅,简单来说就是
1 | Keycomparator comparator_; |
还有要注意的是叶子节点与内部节点的区别
内部节点的第一个key是无效的,而叶子节点不是
并且内部节点的value值指向的是下一个节点,有可能是内部节点,有可能是叶子节点;而叶子节点的value则是数据本身,两者在value上也有区别
理清其中的关系之后,就可以开始实现了
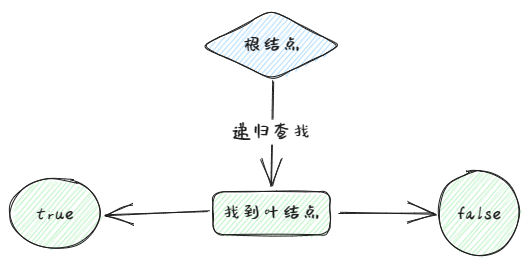
通过Findleaf()函数遍历整个树,从根节点开始查找,直到找到叶节点,再在叶节点中寻找对应key,找到返回true,并赋值给传入参数value,未找到直接返回false
查找方式可以手写二分查找,也可以用标准库比如std::lower_bound,具体实现方式比较自由
注意区分内部节点和叶子节点的查找,具体实现可以在其对应的page页面中进行,重点要注意内部节点的查找,其key值对应的value是大于等于key的集合,如果小于要查找的key,则需要返回key - 1对应的value
Insert
Insert的实现也要依赖于上面写的Findleaf()函数,因为在插入的时候我们需要找到insert_key恰好大于的key,将其插入到key的后面
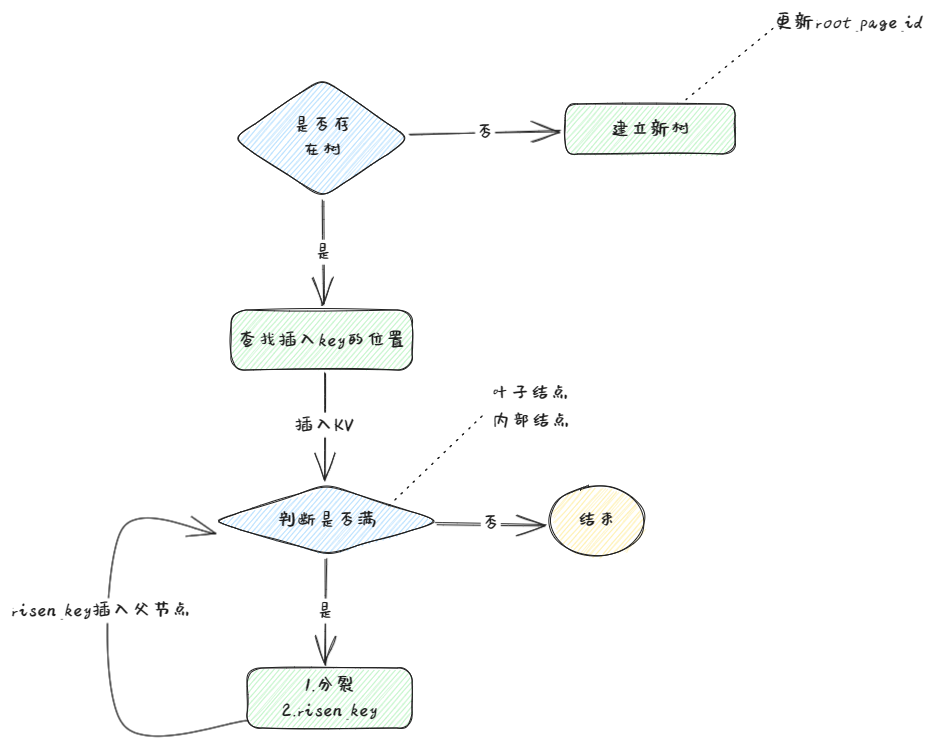
- 首先要检查是否已经存在树,只需要比对root_page_id是否等于INVALID_PAGE_ID即可,如果不存在,则建立新树,开始建立的树一定是leaf_page,最后不要忘记更新root_page_id
- 若已经存在树,则需要通过GetValue()中实现的FindLeaf()函数,找到需要插入键值对的叶子节点,直接插入(为什么可以直接插入?可以通过BusTub B+Tree Printer 看出,叶子节点一旦达到Maxsize便立刻执行分裂操作,即叶子节点一定有空余空间插入一组键值对)
- 插入之后需要判断叶子节点是否已满,若未满,则插入流程结束
- 若叶子节点已满,则执行分裂。分裂过程无非是新建一个叶子节点,将叶子节点分成两个满足半满的节点。一般我们将新节点作为该叶子节点的右邻居节点,所以直接将后半部分copy给right_neighbor_node,注意不要忘记risen_key,新生成了一个节点,新节点的第一个键值将上升至父节点中,此时需要再对父节点是否达成分裂条件进行判断
- 内部节点的分裂条件和叶子节点不同,内部节点的键值对可以占满整个page,换句话说就是当内部节点要插入时,没有足够的空间了,在这种情况下内部节点才会进行分裂,而不像叶子节点一样,一旦达到maxsize立刻分裂。所以内部节点的分裂需要先为其开辟一段能容纳下新键值对的空间,再进行插入流程,插入完成后,再将新page中的键值对像叶子节点一样,copy给新内部节点,此时,由于存在新的内部节点,该内部节点的第一个key将上升至父节点(内部节点),再对其父节点进行判断,依次递推,直到节点不需要分裂(未满)为止
notes:
分裂过程中,原节点的值其实不需要变动,只需修改节点的size即可,之后如有新值会直接覆盖掉
risen_key在叶子节点和内部节点中也不同,叶子节点是array[0].first,内部节点是array_[1].first
插入操作其实也不是非常复杂,remove要比insert更为复杂一些
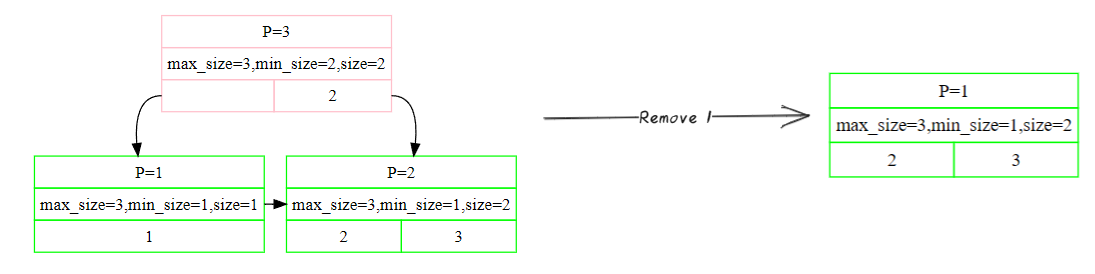
Remove
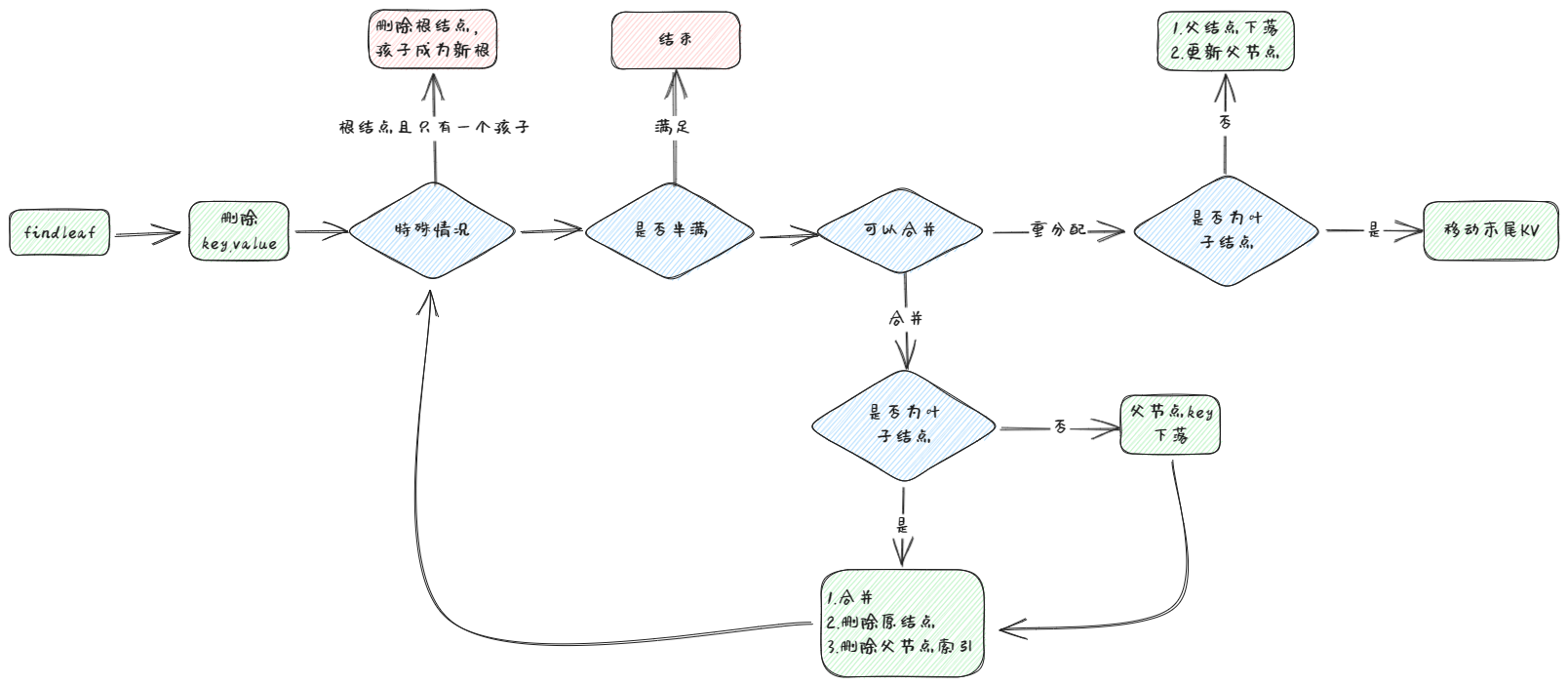
Remove和Insert一样首先要拿到进行删除操作的叶子节点,直接进行删除操作,此时要考虑删除节点是根节点这一特殊情况,如果是根节点且恰好只剩一个孩子,那么这个根节点就没有存在的意义了,所以要让其only_child成为新根。
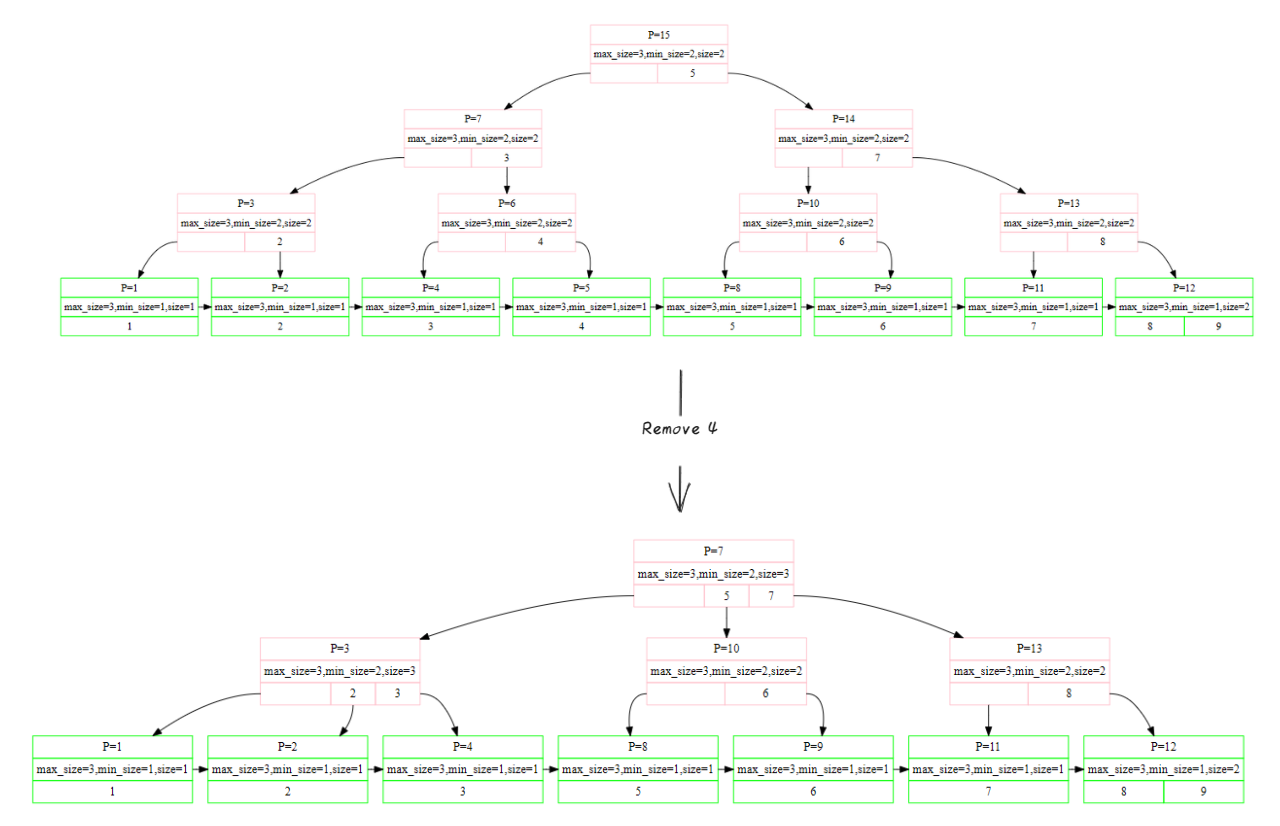
如果不为特殊情况,则对进行删除操作的节点进行判断,是否满足半满条件(注意叶子节点和内部节点的半满条件不同),若满足,则可以直接结束
如果不满足半满条件,则需要进行合并(Merge)或者重构(Redistribute),怎么判断Merge还是Redistribute呢?这里就是要拿到其邻居(前后都可以),判断能否容纳两个节点的项
如果不可以容纳两个节点的项,则进行重分配。即将前节点的最后一项copy到后节点的第一项,注意后节点的key要在父节点中更改(因为first_key变了),如果是叶子节点可以直接将后节点0号key上升,如果是内部节点就要复杂一些,因为内部节点不可以重复,所以就有fallen_key的存在,在copy之前要先将父节点对应的key下落至0号位置(虽然内部节点的第一个key值无效,但是不影响我们存储键值),再进行重分配,分配完成后再将后节点的0号key更新至fallen_key位置。同时,因为是内部节点,不要忘记修改其移动项的子页面,要将其所有子页面的parent_page_id更新。
如果可以容纳两个节点的项,则会进行合并。将节点内部项全部移动到其邻居节点中,将父节点中原本键值对移除(其实就是将所有原位置后KV前移一位,再修改一下size即可)。合并完成后,还需要进行递归操作,因为父节点的size改变了,所以有可能不满足半满条件,直到有一个父节点满足半满条件为止
总体的删除流程就结束了
Debug && Sum up
虽然总体流程结束了,中途还会有无数个bug,尤其是当代码写的越来越长的时候,debug就成了十分折磨人的事情。但是善良的TAs为我们提供了一些用于debug的接口,可以在测试代码中利用Draw函数输出dot文件,将dot文件的内容贴到Graphviz Online 将树可视化,(你甚至可以看到每一步的树长什么样),再根据自己的树和测试样例进行比对,从而定位错误
也可以使用b_plus_printer来自行定义树,进行一些操作后来和官方给的可视化工具BusTub B+Tree Printer 进行比对,我当时就是用的这个方法加上打断点的方式定位到remove函数中的错误。
另外Insert测试样例中有用到迭代器的实现,可以忽略,也可以写上,毕竟不像B+树构造这么复杂,同时别以为本地测试样例过了就是成功了,因为checkpoint1的本地测试样例实在是太弱了(不光本地测试样例弱,我怀疑线上的测试样例也是本地的这几个),唯一有点点点难度的是ScaleTest,我看到好多人ScaleTest过不去,这个情况一般都是UnpinPage没有做好,多检查一下是不是Fetch之后忘记Unpin了。我当时remove函数实现有错误,提交到Gradescope上都显示全对,这个困扰了我很长时间,解决办法也是有的,下篇文章见!